1_ResetGyro_have you reset everytime?
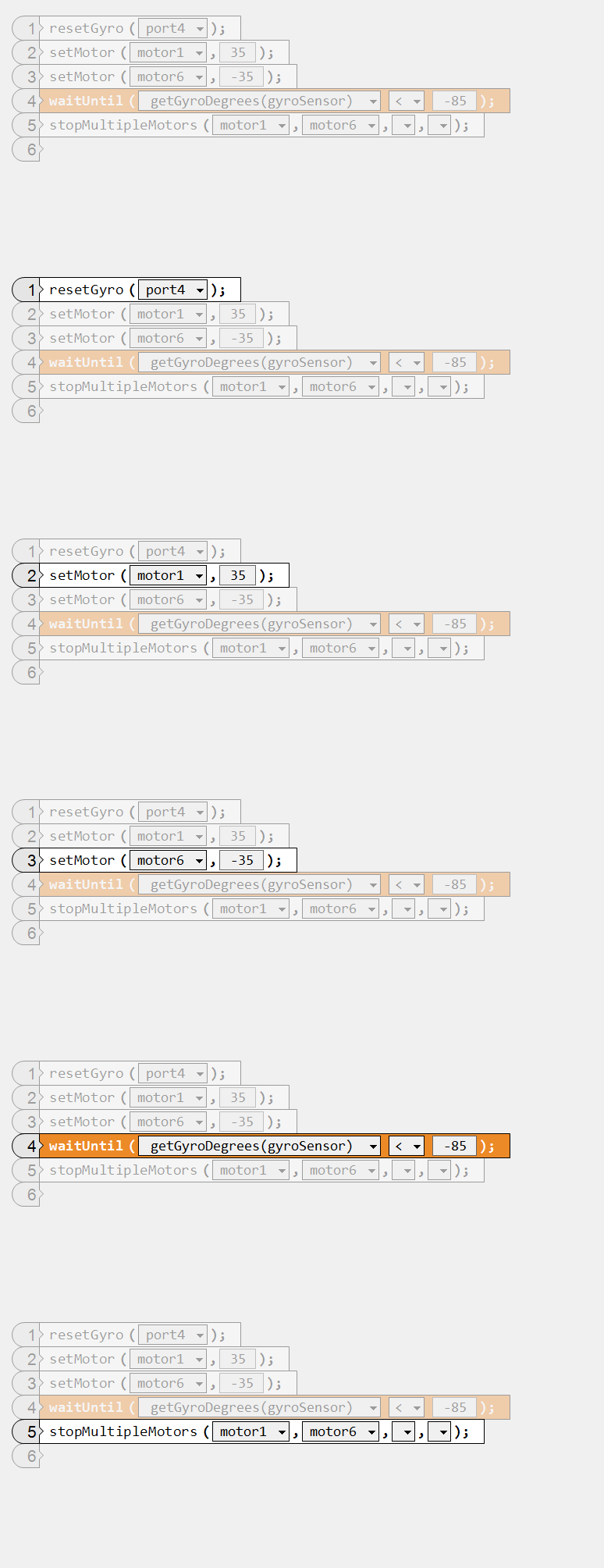
Reset the Gyro Sensor's value to 0.
Set the Gyro Sensor to register
the current position of the robot as "0 degrees".
2_SetMotor_sets just one motor
Turns motor 1 On at 35% power.
Starts turning the robot to the right
by driving the left side of the robot forward.
3_SetMotor_
Turns motor 1 On at -35% power.
Starts turning the robot to the right
by driving the right side of the robot backward.
4_WaitUntil_
Stops the program from processing
additional commands until the Gyro Sensor's Degrees value
is less than -85.
Robot waits until it have turn to the right 85 degrees.
5_StopMultipleMotors_blah
Stops motors 1 and 6.
Stops the robot (after the WaitUntil block finishes).

1_ResetGyro_
Reset the Gyro Sensor's value to 0.
Set the Gyro Sensor to register
the current position of the robot as "0 degrees".
 2_SetTouchLEDColor_ORANGE
Set the value of the TouchLED as 'colorOrange'
Lights TouchLED in Orange to indicate that
the robot is moving forward.
2_SetTouchLEDColor_ORANGE
Set the value of the TouchLED as 'colorOrange'
Lights TouchLED in Orange to indicate that
the robot is moving forward.
3_Forward_
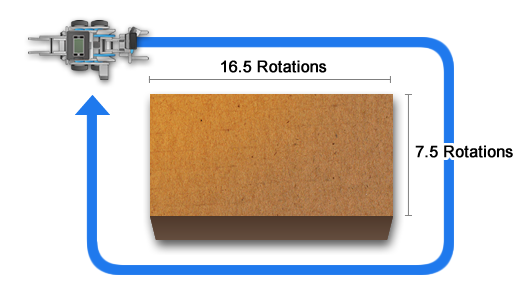
Moves the robot forward 3 rotations at 50% power.
The robot drives along the long side of the box.
4_SetMotor_
Turns motor 1 On at -35% power.
Starts turning the robot to the left
by driving the left side of the robot backward.
5_SetMotor_
Turns motor 1 On at 35% power.
Starts turning the robot to the left
by driving the right side of the robot forward.
 6_SetTouchLEDColor_
Set the value of the TouchLED as 'colorBlue'
Lights TouchLED in Blue to indicate that the robot
is making a turn.
6_SetTouchLEDColor_
Set the value of the TouchLED as 'colorBlue'
Lights TouchLED in Blue to indicate that the robot
is making a turn.
7_WaitUntil_
Stops the program from processing
additional commands until the Gyro Sensor's Degrees value
is less than -88.
Robot waits until it have turn to the right 88 degrees.
8-13_RepeatedPattern_
Copy of the behavior pattern used earlier in the program.
LED lights up in Orange to indicate that the robot is
moving forward for 7.5 rotations, the short side of the box.
After moving forward, LED lights up in Blue, and the robot turns until the
Gyro Sensor's value is less than -178. (Additional approx. 90 degrees to the right).
14-19_RepeatedPattern_
Copy of the behavior pattern used earlier in the program.
LED lights up in Orange to indicate that the robot is
moving forward for 16.5 rotations, the long side of the box.
After moving forward, LED lights up in Blue, and the robot turns until the
Gyro Sensor's value is less than -268. (Additional approx. 90 degrees to the right).
20_StopMultipleMotors_blah
Stops motors 1 and 6.
Stops the robot (after the WaitUntil block finishes).