Program Review: 50cm Challenge
Program Review: Gripper Control
- The program shown below is a sample solution to the
Gripper Control Mini-Challenge
from Moving Forward 4.
-
It assumes that the robot starts out with its arm
raised all the way up, and that the object is placed 20cm away
from the robot.
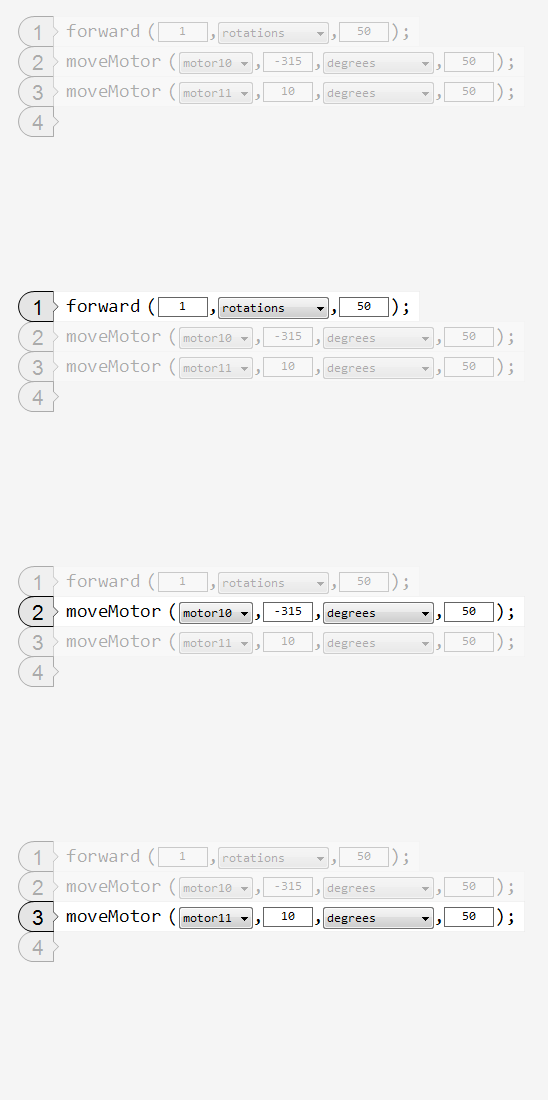
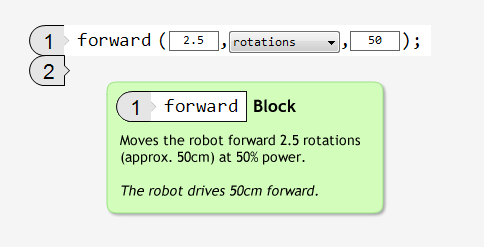
1_Forward_Block
Moves the robot forward 1 rotation at 50% power.
Drives the robot to the object.
2_MoveMotor_Blah
Turns the Motor at Port 10 (Robot Arm) for -315 degrees.
Lowers the Robot Arm onto the object, assuming the arm
was raised all the way up in the beginning.
3_MoveMotor_Blah
Turns the Motor at Port 11 (Gripper) for 10 degrees.
Closes the gripper to grab the object.
Program Review: Cargo Transport
- The program shown below is a sample solution to the
Cargo Transport Mini-Challenge
from Moving Forward 4.
-
It assumes the robot arm starts in the down position with the claws open wide.
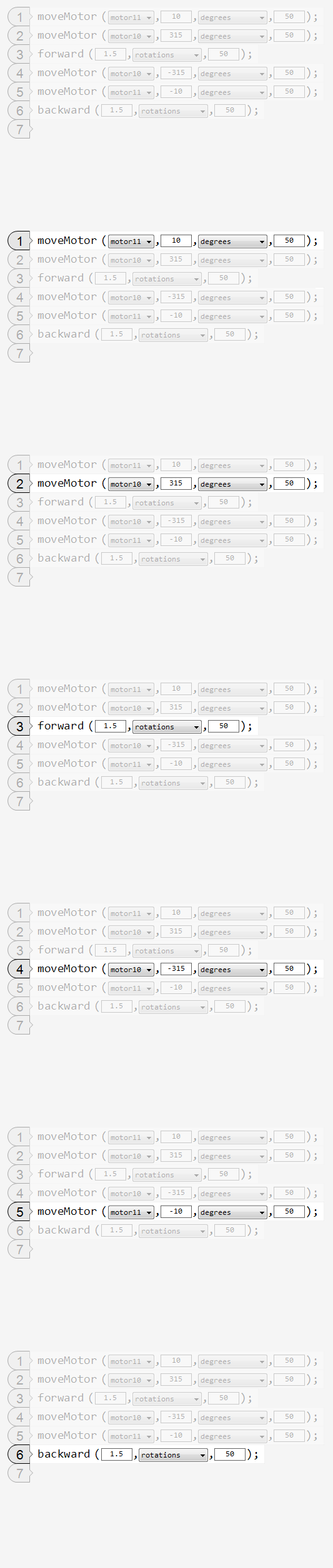
1_MoveMotor_closeGripper
Turns the Motor at Port 11 (Gripper) for 10 degrees.
Closes the gripper to grab the object,
assuming the object is initially placed in the robot's gripper.
2_MoveMotor_raise arm
Turns the Motor at Port 10 (Robot Arm) for 315 degrees.
Raises the Robot Arm with the object to begin
carrying it to the goal.
3_Forward_Block
Moves the robot forward 1.5 rotation
(approx. 30cm) at 50% power.
The robot drives 30cm forward to bring
object to the drop off area.
4_MoveMotor_lowerArm
Turns the Motor at Port 10 (Robot Arm) for -315 degrees.
Lowers the Robot Arm to set the object down.
5_MoveMotor_Blah
Turns the Motor at Port 11 (Gripper) for -10 degrees.
Opens the gripper to drop the object.
6_Backward_Block
Moves the robot backward 1.5 rotation
(approx. 30cm) at 50% power.
The robot drives back to the starting point.