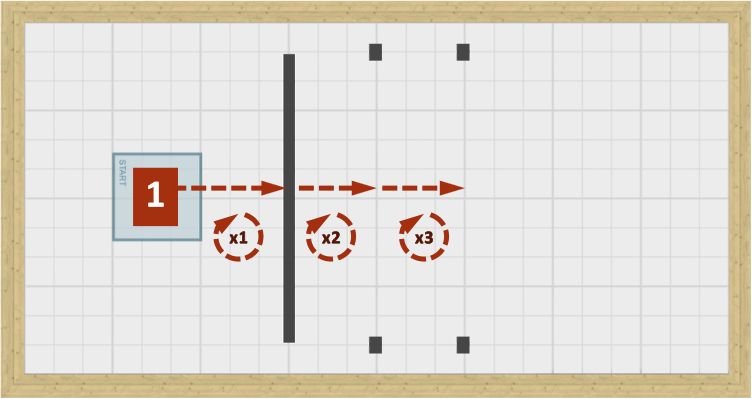
At the beginning of the challenge, make sure that the robot is placed so the sensor is slightly past the starting line.
The robot will travel from the starting line to line one and record the distance that it traveled.
The robot will then return to the start.
The robot will then drive forward double the distance and return to the start again.
Finally, the robot will travel triple the distance and then return back to the start.
The distance from the start to line one will be random.