Gyro Resetting
Comment out the "gyroReset" line in the program, and run the program several times in a row.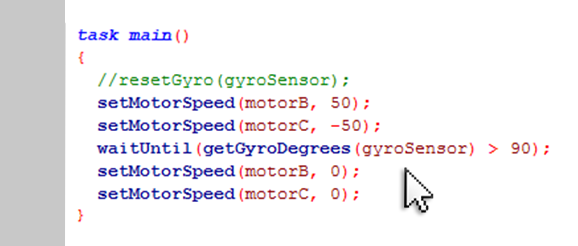
|
The gyro sensor retains its value between runs, That means the waitUntil command will immediately see a value > 90,
The robot will appear to move nowhere, |
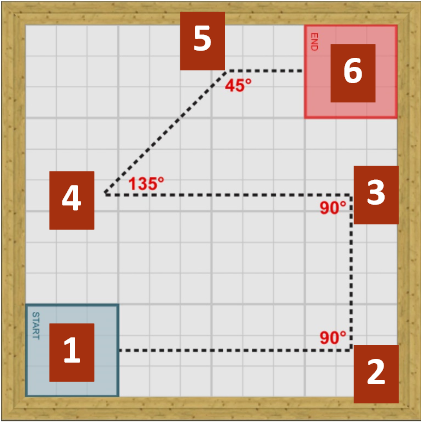
Mini Challenge 1: Gyro Hunt
Program the robot to utilize the gyro sensor in order to make correct turns and navigate the challenge table correctly.
|