Did you know?
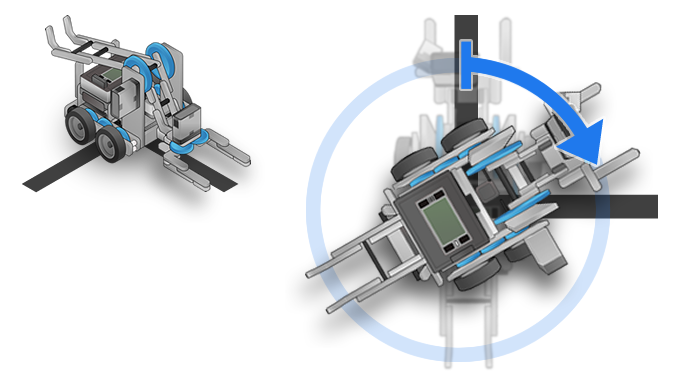
Point Turns vs. Swing Turns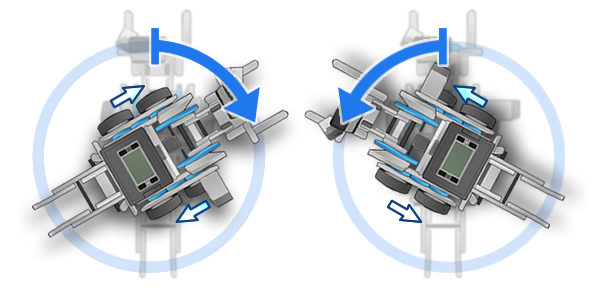 |
The "turnLeft" and "turnRight" commands in ROBOTC only execute "point turns", where one wheel moves forward and the other wheel moves backwards. |
|
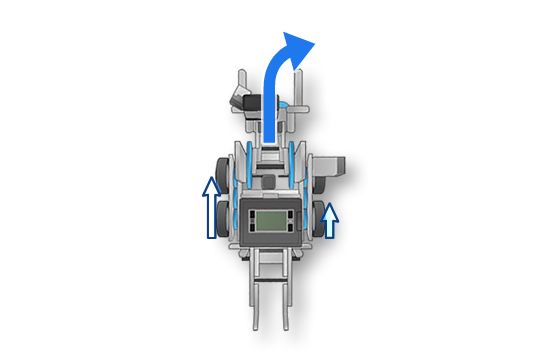 |
A swing turn is a different type of turn that will allow your robot to turn by pivoting - one wheel moves forward, the other wheel remains stationary. Different types of turns will allow your robot to navigate around obstacles easier. |
|
Different Types of Turns
Left turns and right turns allow you to navigate your robot, but so far you've only tried "point" turns. Using only the moveMotor command your robot will make a "swing turn", where only one motor moves.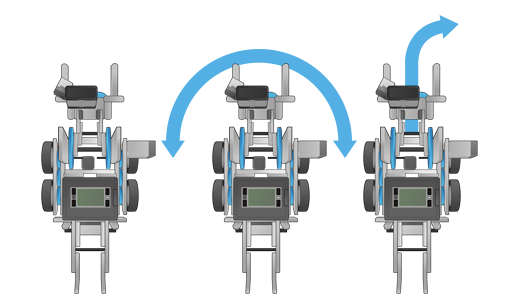
Wheel Base and Size
What happens if you increase the distance between the two wheels?| Increasing the wheel base (distance between the to main wheels) will cause the robot to have a wider swing turn. The size of the wheel will affect every motion of the robot, depending on how much larger or smaller the wheel is when compared to the standard EV3 wheel. The larger the wheel, the more distance the robot will travel. The smaller the wheel, less distance is covered. |
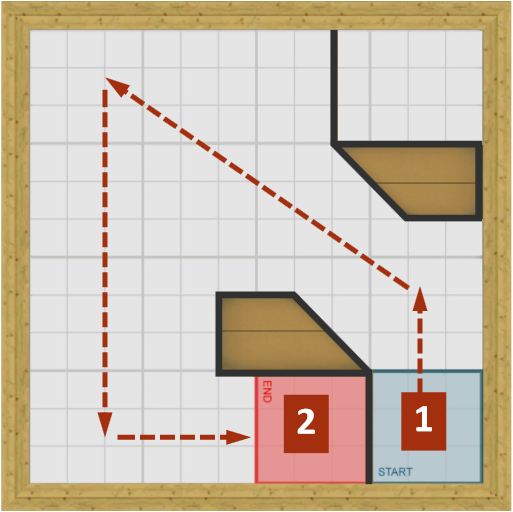
Mini Challenge 1: 90 Degree Right Turn
Program the robot to make an accurate 90 degree turn.
|
Mini Challenge 2: Mini-Maze
This challenge features a series of turns that the robot must make in order to get to the goal area.
|