
Robot Base Configuration
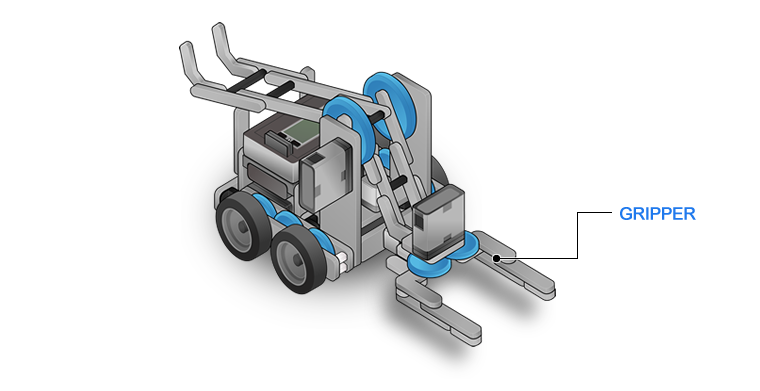
For this chapter, the VEX IQ driving base with the claw gripper is required to complete this section.
| Virtual VEX IQ |
Choose the following configuration in RVW.
|
| Physical VEX IQ | Download and follow building instruction below if the robot is not yet built. VEX IQ Build Instructions [PDF] |