
Manual Robot Configuration
Open a new blank program and configure your robot without using a standard model.|
Make sure to configure the motors and sensors to the correct ports.  Configuring the robot manually will generate a few extra lines of code at the beginning. |
Did you know?
Robot Configurations|
Standard models help configure your robot quickly, but don't allow much configuration for custom robots.  Inside of Motors and Sensor Setup, in addition to renaming your motor and sensor ports, you can also customize the settings of each device. 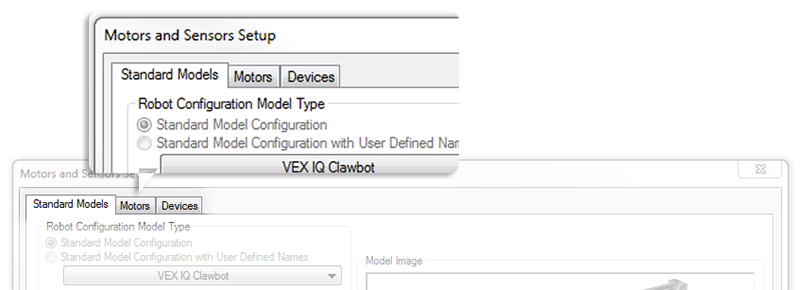 With Motors, you can reverse the direction of the motor and set the "Drive Side" of your motor.  With Devices, you can change the name of the sensor and also set the sensor type. 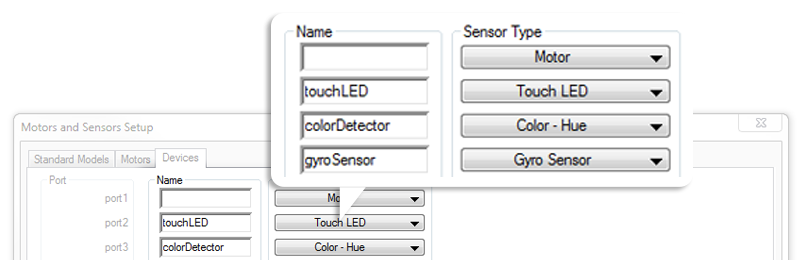 |