Arm Speed Control
The fourth box of the armControl command block allows you to control the speed that the arm motor is assigned.

| Higher the value of the fourth box, quicker the arm raises or lowers! |
Mini Challenge 1: Claw Control
The armControl command block is not limited to controlling actual arm motors. It can also be used to control the claw motor on your robot.
|

Mini Challenge 2: Wait For Button Press
The buttons on the VEX IQ Controller are not limited to controlling the arm and gripper motors on your robot.
|
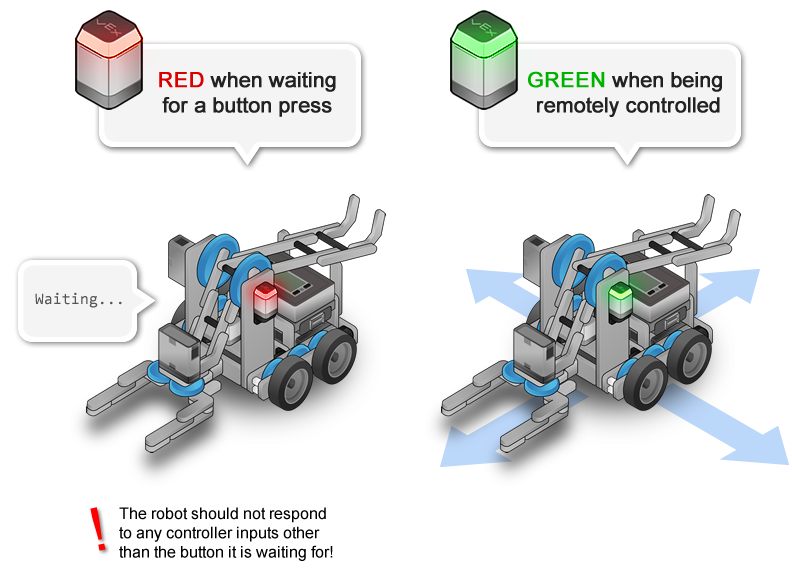
You can use the waitUntil command block to have the program flow stay at a certain spot until a condition is met.
Buttons have a value of 1 when pressed, and 0 when not pressed.