Mini Challenge 1: Color Sensor Comparison
The If/Else Conditional Block can use other sensors to make its decision as well!
|
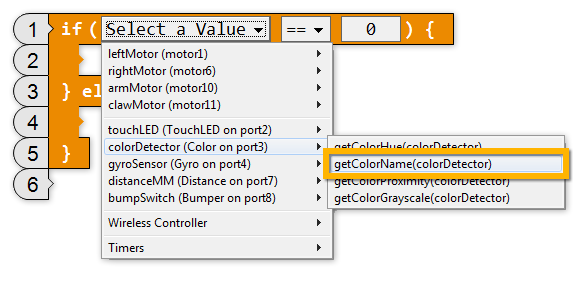
Can't remember how to make Color Sensor detect colors? Review it again from Page 3 of the Color Sensor chapter.
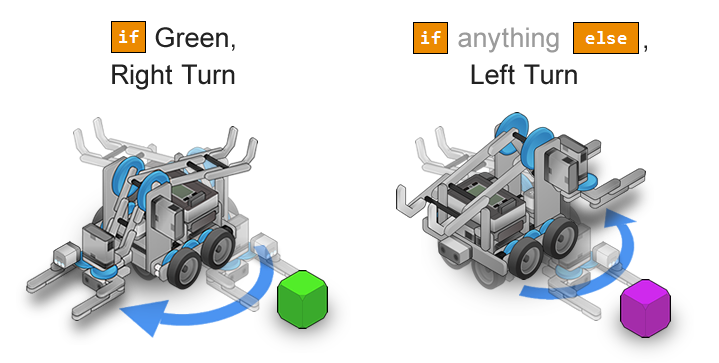
To make the robot make decision based on whether the object is green or not, set your if/else block to detect the color green.