Program Review: Square Dance 1
- The program shown below is a sample solution to the
Square Dance 1 Mini-Challenge
from Loops 3.
-
In the solution, the robot travels clockwise around the square box.
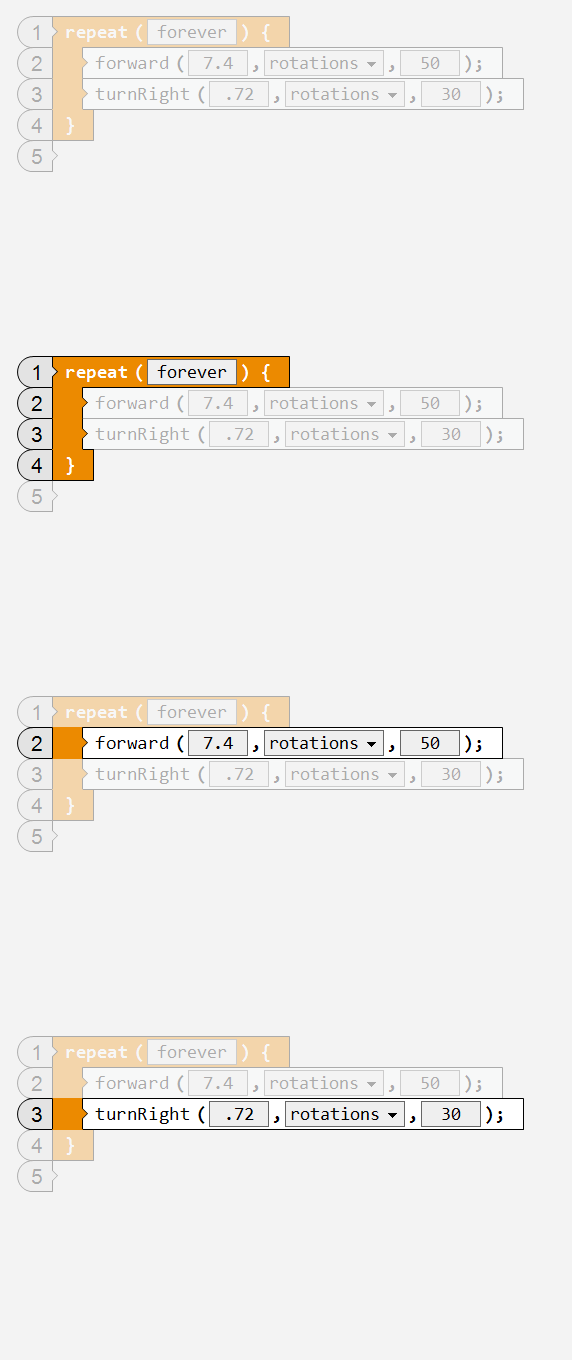
1_RepeatForever_Block
Always sends the program flow back to
the start of the loop when the flow reaches the end of the loop (' } ').
Robot repeats the movements inside the
loop forever.
2_Forward_
Moves the robot forward 7.4 rotations
(a side of the square box) at 50% power.
The robot drives along one of the side
of the square box.
3_TurnRight_
Turns in place to the right, for 0.72
rotations (approx. 90 degrees) at 30% power.
Turns 90 degrees to the right.
Program Review: Square Dance 2
- The program shown below is a sample solution to the
Square Dance 2 Mini-Challenge
from Loops 4.
-
In the solution, the robot travels clockwise around the square box.
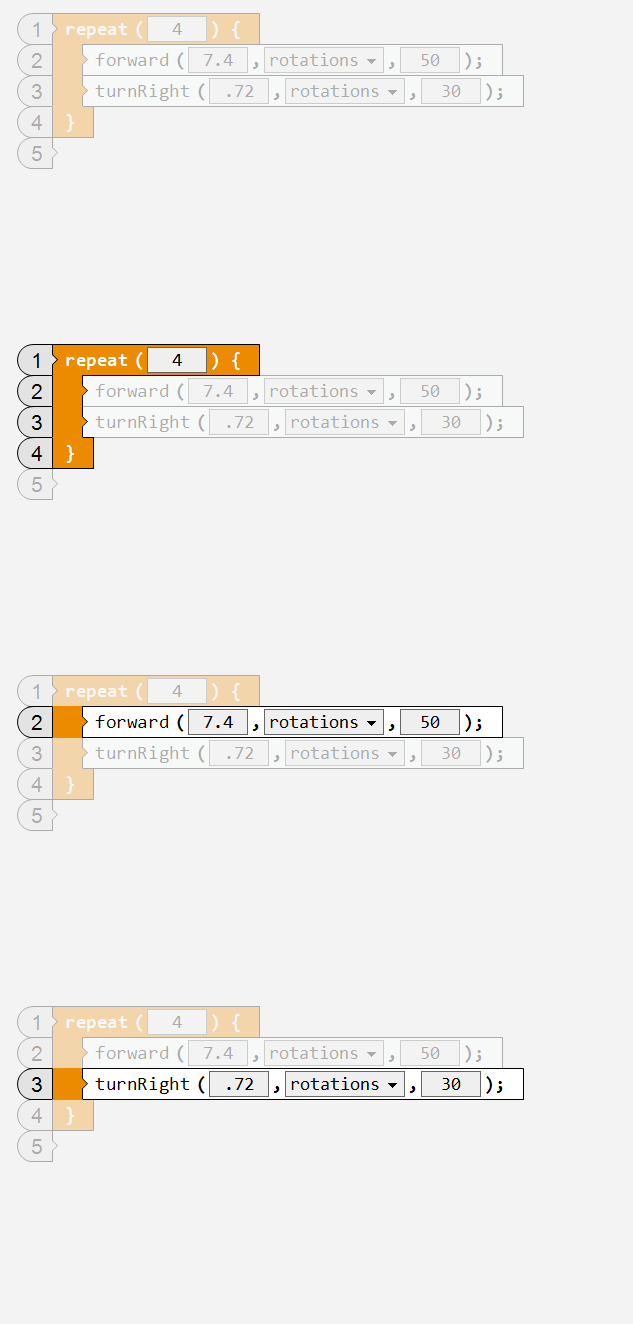
1_Repeat_Block
Conditionally sends the program flow
back to the start of the loop. Lets the flow
out of the loop after the 4th pass through the loop.
Robot repeats movements inside the loop
until they have been run 4 times, which makes one square lap.
2_Forward_
Moves the robot forward 7.4 rotations
(a side of the square box) at 50% power.
The robot drives along one of the side
of the square box.
3_TurnRight_
Turns in place to the right, for 0.72
rotations (approx. 90 degrees) at 30% power.
Turns 90 degrees to the right.
Program Review: Square Dance 3
- The program shown below is a sample solution to the
Square Dance 3 Mini-Challenge
from Loops 5.
-
In the solution, the robot travels clockwise around the square box.
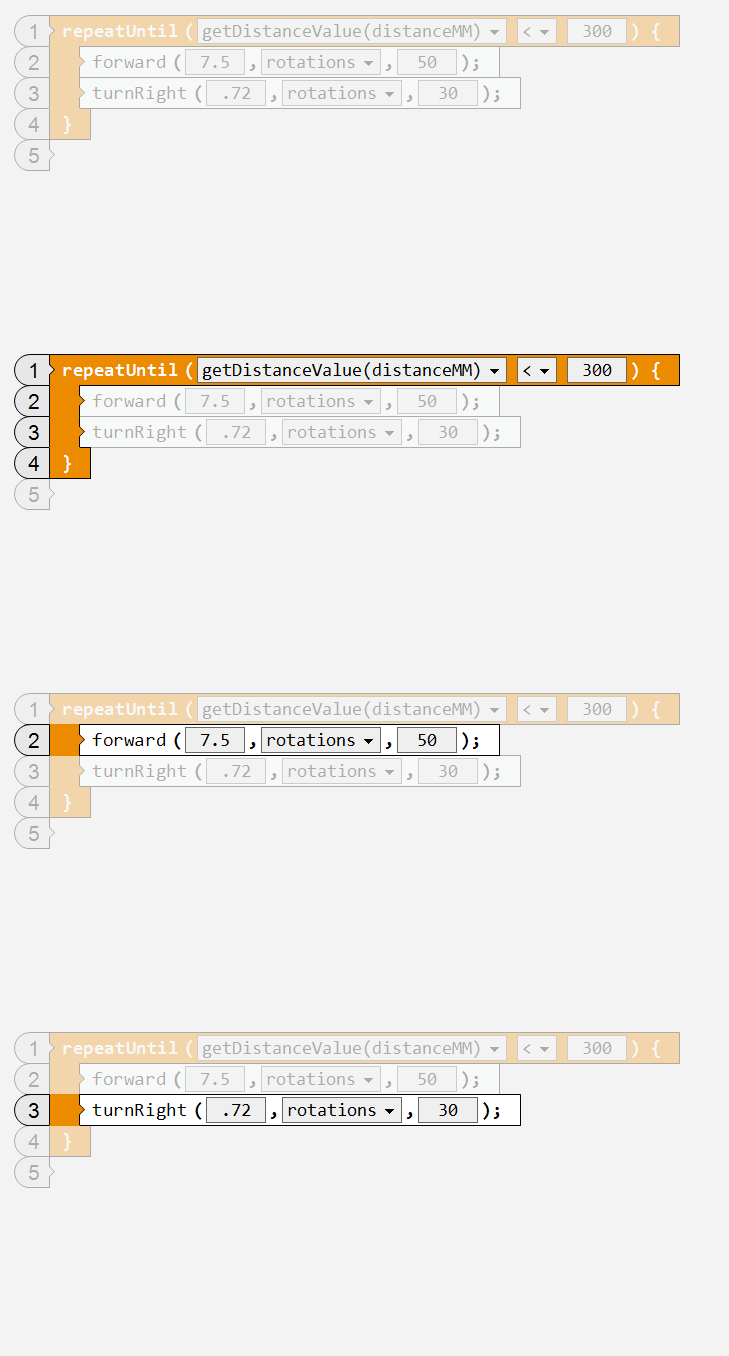
1_RepeatUntil_Block
Conditionally sends the program flow
back to the start. Lets the flow out of the loop if the sensor's value is
'less than 300mm' at the beginning of the loop.
Robot repeats movements inside the loop
until the Ultrasonic Sensor sees an object within 3 cm at the exact moment
the loop starts (just after turn completes).
2_Forward_
Moves the robot forward 7.5 rotations
(a side of the square box) at 50% power.
The robot drives along one of the side
of the square box.
3_TurnRight_
Turns in place to the right, for 0.72
rotations (approx. 90 degrees) at 30% power.
Turns 90 degrees to the right.