Robot Base Configuration
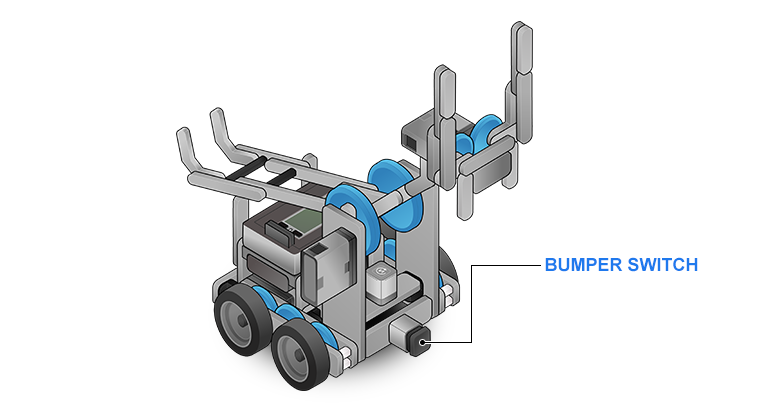
For this chapter, the VEX IQ driving base with the the Bumper Switch is required to complete sections of this chapter as well as the final challenge.
| Virtual VEX IQ |
Choose the following configuration in RVW.
|
| Physical VEX IQ |
Download and follow building instruction below
if the robot is not yet built.
VEX IQ Build Instructions [PDF]
If your robot is alredy built: Jump to Clawbot IQ with sensor (page 28), to make sure the sensors are attached correctly. |