Clearing Encoder Values
Try commenting out the "resetMotorEncoder" command that is right under the Task Main|
The motor encoders do not reset between runs so the value that is being stored in the variable encoderLine1 is incorrect. The variable is now storing the value of all the cumulative runs of the robot because the motor encoder is not being reset. |
Using Encoders Driving Backwards
Create a program that has the robot run backwards until it reaches a certain encoder value.|
Since the robot is moving backwards for a certain amount of encoder counts, we have to use getMotorEncoder in the waitUntil command. 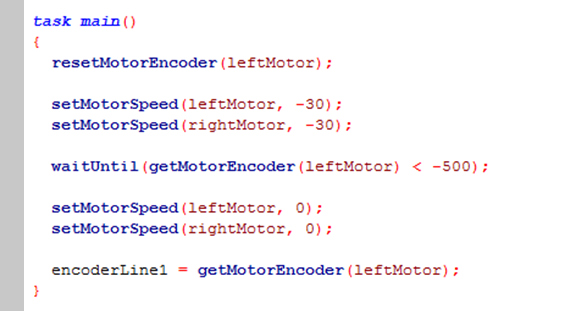 |
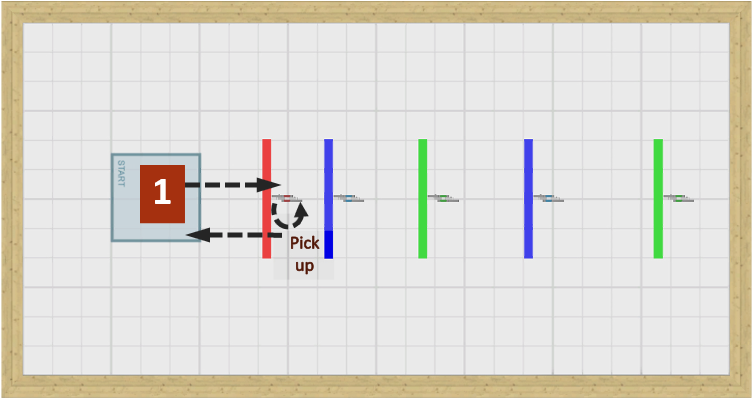
Mini Challenge 1: Loading Dock
Program the robot to pick up blocks that are placed at random distances away from the starting point.
|