Setting Thresholds
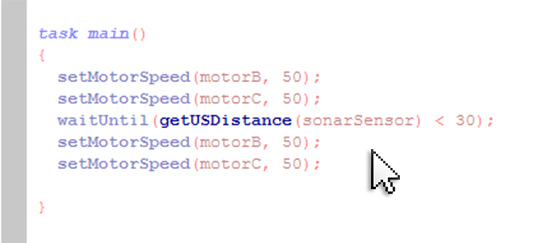
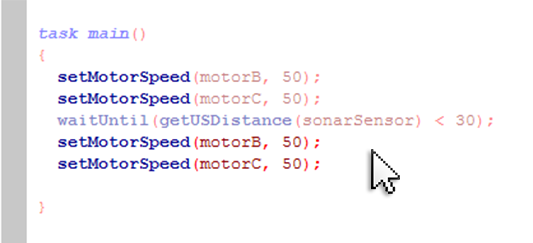
Thresholds are values that set a cutoff in a range of values, so that even if there are many possibilities, the value eventually falls above the threshold, or below the threshold.Use the "Forward Until Near" program and experiment with different thresholds.
Try it!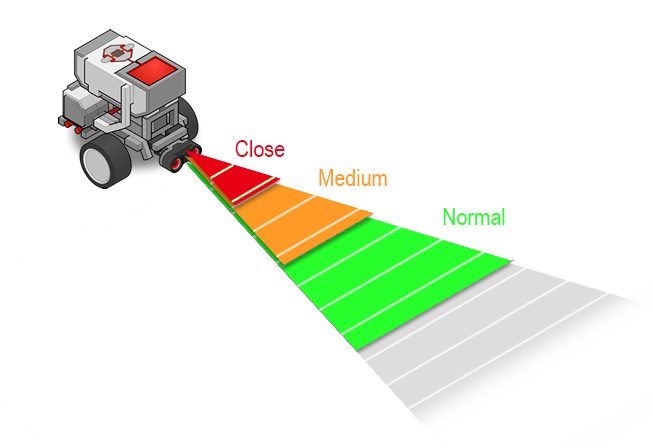
Did you know?
Get vs. Set Commands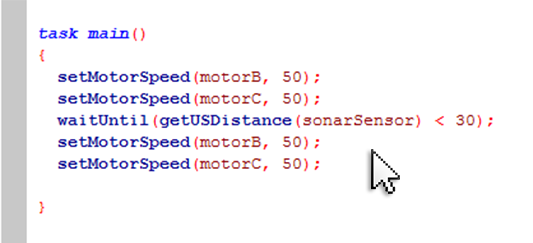 |
In ROBOTC, a number of commands will start with the words "Get" and "Set" |
|
 |
A "Get" command is used when the program is retrieving a value from robot - such as the value from a motor, sensor or system device such as a timer. |
|
 |
A "Set" command is used when the program is storing a value into the robot - setting a motor speed or the value of a sensor. |
|
Did you know?
Thresholds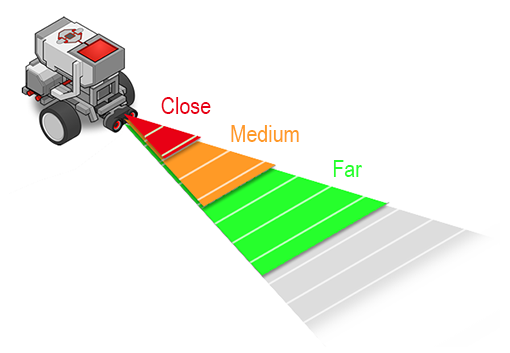 |
Sonar sensors uses a concept of thresholds to determine "Close" and "Far" A threshold is the cross-over point where the program thinks the robot is either close or far away from an object. |
|
Did you know?
Multiple Sonar Sensors Interference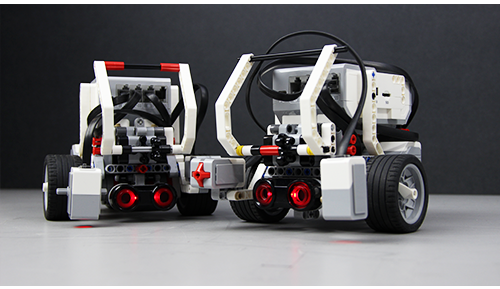 |
Having multiple sonar sensors being used simultaneously may produce unwanted values when running robots. |
|
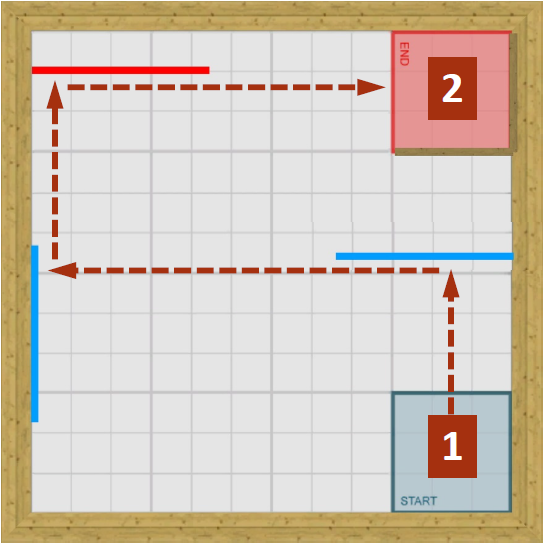
Mini Challenge 1: Shifting Maze Hands Off
This challenge asks the user to program the robot to move from its starting area through a maze with tall, vertical walls. The walls in the maze can be adjusted so the robot needs to rely upon sensor input in order to be able to navigate successfully through the maze.
|