Did you know?
Boolean LogicDid you know?
Sense, Plan, Act Concept |
Sense, Plan, Act was an early robot control procedure commonly abbreviated SPA. Today we use its fundamental concepts to remind us of the three critical capabilities that every robot must have in order to operate effectively: |
|
 |
The robot needs the ability to sense important things about its environment, like the presence of obstacles or navigation aids. What information does your robot need about its surroundings, and how will it gather that information? |
|
 |
The robot needs to take the sensed data and figure out how to respond appropriately to it, based on a pre-existing strategy. Do you have a strategy? Does your program determine the appropriate response, based on that strategy and the sensed data? |
|
 |
Finally, the robot must actually act to carry out the actions that the plan calls for. Have you built your robot so that it can do what it needs to, physically? Does it actually do it when told? |
|
Did you know?
How the Touch Sensor Works?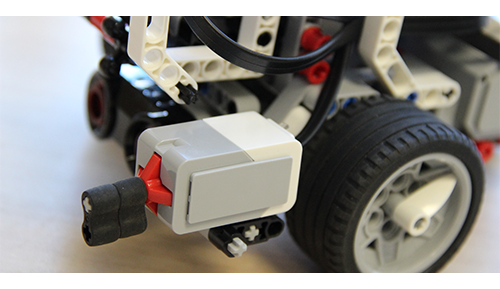 |
When the Touch Sensor is pressed, it closes an electrical circuit, allowing current to flow.
If the Touch Sensor is released, the circuit is broken and no current flows. The flow (or lack) of current is detected by the EV3, allowing it to determine if the Touch Sensor is pressed. |
|


Sense, Plan, Act Concept
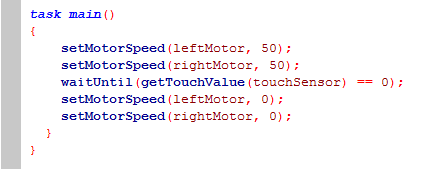
Take a look at the following program: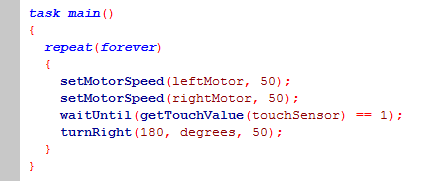
Forward Until Release
Start a new program, program that has the robot run until the touch sensor is released instead of until the touch sensor is pressed.|
This means that the robot should move while the value of the touch == 1
To run the program, you can have the robot push a box off the table or run the program while manually pushing the Touch Sensor. |
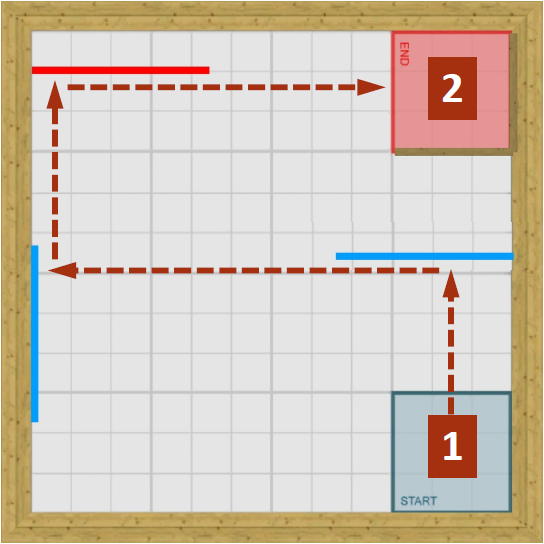
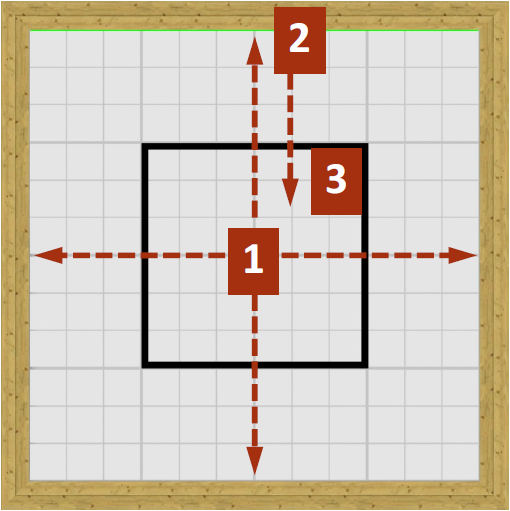
Mini Challenge 1: Hub Drill
The robot should start in the middle of the challenge table. The robot travels forward and stops when it reaches the wall and the touch sensor is pressed. The robot then returns to the middle of the challenge table.
|
Mini Challenge 2: Shifting Maze Hands On
This challenge asks the user to program the robot to move from its starting area through a maze with tall, vertical walls. The walls in the maze can be adjusted so the robot needs to rely upon sensor input in order to be able to navigate successfully through the maze.
|